





Description
Description:
Rated Voltage: DC5V
4-phase
Reduction Ratio: 1/64
Step Torque Angle: 5.625/64
DC Resistance: 200±7% (25)
Insulation Resistance: >10M (500V)
Dielectric Strength: 600V AC / 1mA / 1s
Insulation Grade: A
No-load Pull in Frequency: >600Hz
No-load Pull out Frequency: >1000Hz
Pull in Torque: >34.3mN.m(120Hz)
Detent Torque: >34.3mN.m
Temperature Rise: <40K(120Hz)
Noise: <40dB (120Hz, No load, 10cm)
Board Size: Approx. 29 ×21 m
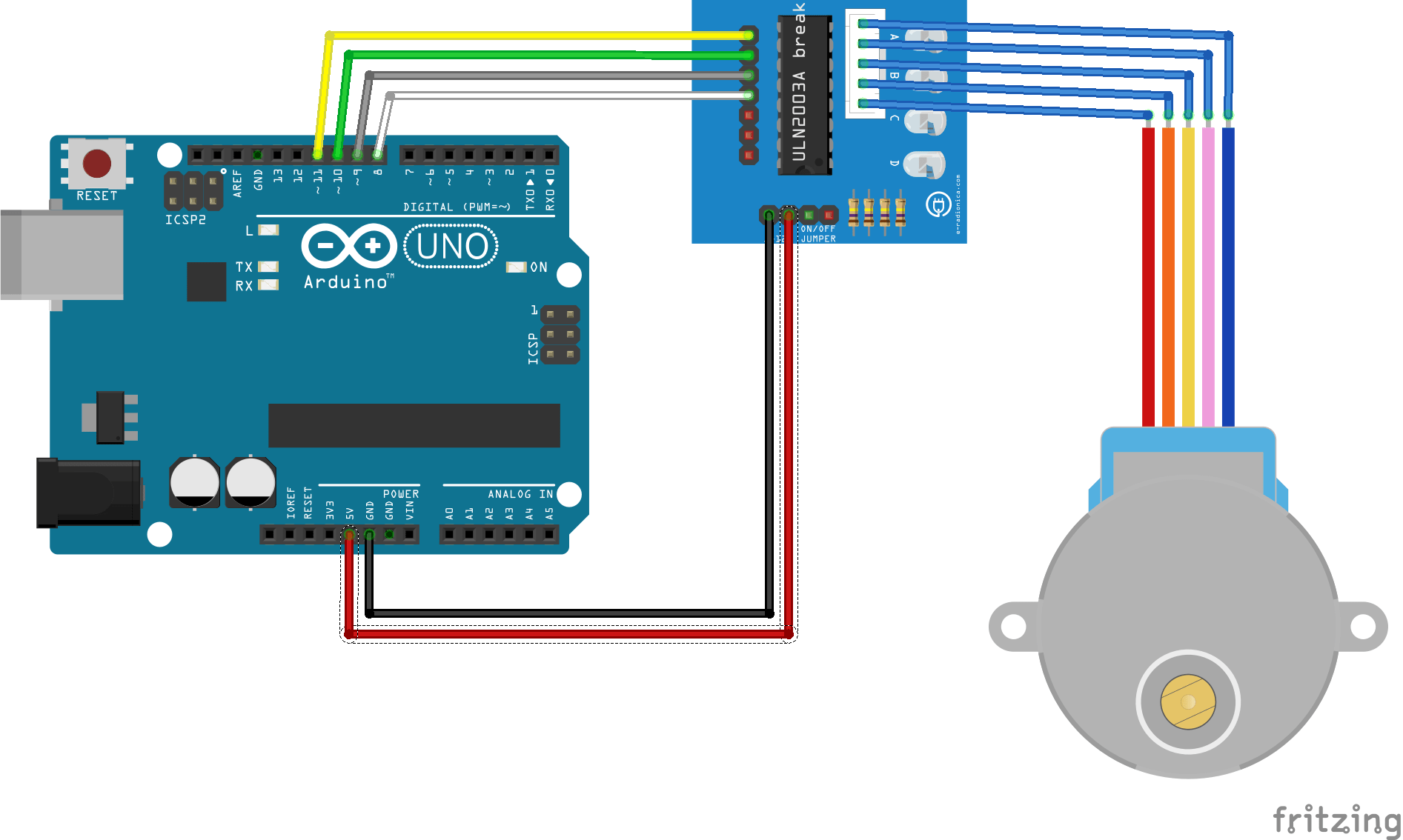
Schematics
Steppers required a power supply of 3V, 5V or more. External power supply should be preferred especially if the motor requires more than 5V. In this case, the stepper can be powered with the pin 5V of the board and the Arduino can be powered via the USB cable.
Code
To control a unipolar motor we used a 8-step sequence. The stepper 28BYJ-48 describe a rotation in 2048 steps.
#define IN1 11 #define IN2 10 #define IN3 9 #define IN4 8 int Steps = 0; int Direction = 0; int number_steps=512;//= 2048/4 void setup() { Serial.begin(9600); pinMode(IN1, OUTPUT); pinMode(IN2, OUTPUT); pinMode(IN3, OUTPUT); pinMode(IN4, OUTPUT); // delay(1000); } void loop() { //1 rotation counter clockwise stepper(number_steps); delay(1000); //1 rotation clockwise stepper(-number_steps); delay(1000); //Keep track of step number for(int thisStep=0;thisStep<number_steps;thisStep++){ stepper(1); } delay(1000); for(int thisStep=number_steps;thisStep>0;thisStep--){ stepper(-1); } delay(1000); } void stepper(double nbStep){ if(nbStep>=0){ Direction=1; }else{ Direction=0; nbStep=-nbStep; } for (int x=0;x<nbStep*8;x++){ switch(Steps){ case 0: digitalWrite(IN1, LOW); digitalWrite(IN2, LOW); digitalWrite(IN3, LOW); digitalWrite(IN4, HIGH); break; case 1: digitalWrite(IN1, LOW); digitalWrite(IN2, LOW); digitalWrite(IN3, HIGH); digitalWrite(IN4, HIGH); break; case 2: digitalWrite(IN1, LOW); digitalWrite(IN2, LOW); digitalWrite(IN3, HIGH); digitalWrite(IN4, LOW); break; case 3: digitalWrite(IN1, LOW); digitalWrite(IN2, HIGH); digitalWrite(IN3, HIGH); digitalWrite(IN4, LOW); break; case 4: digitalWrite(IN1, LOW); digitalWrite(IN2, HIGH); digitalWrite(IN3, LOW); digitalWrite(IN4, LOW); break; case 5: digitalWrite(IN1, HIGH); digitalWrite(IN2, HIGH); digitalWrite(IN3, LOW); digitalWrite(IN4, LOW); break; case 6: digitalWrite(IN1, HIGH); digitalWrite(IN2, LOW); digitalWrite(IN3, LOW); digitalWrite(IN4, LOW); break; case 7: digitalWrite(IN1, HIGH); digitalWrite(IN2, LOW); digitalWrite(IN3, LOW); digitalWrite(IN4, HIGH); break; default: digitalWrite(IN1, LOW); digitalWrite(IN2, LOW); digitalWrite(IN3, LOW); digitalWrite(IN4, LOW); break; } delayMicroseconds(1000); if(Direction==1){ Steps++;} if(Direction==0){ Steps--; } if(Steps>7){Steps=0;} if(Steps<0){Steps=7; } } }
Package Included:
1pcs X ULN2003 Driver board
Related Products
Related Products

ULN2003 Stepper Motor Driver Board
diymore


ULN2003 Stepper Motor Driver
Dikavs


5V Stepper Motor + Driver ULN2003
Deek-Robot


L298N Dual Bridge DC stepper Motor Driver Board
Dikavs
")
")
A4988 Stepper Motor Driver(with Heatsink)
Electro